嵌入式程序设计ch5-嵌入式输入/输出设备接口
本文最后更新于:9 个月前
嵌入式系统设计-嵌入式输入/输出设备接口
一.I/O接口
硬件结构
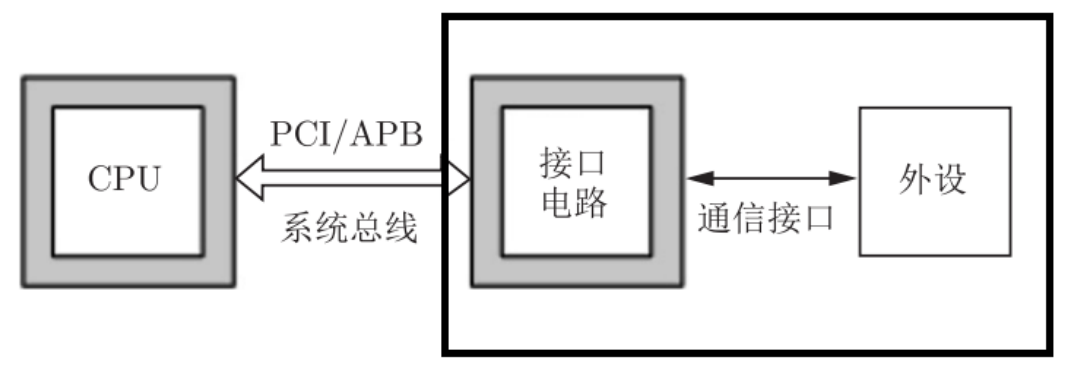
接口结构:连接外设与CPU的中间接口电路
满足外设具备多样性、复杂性、异构性的要求
中间接口电路即输入/输出接口电路,简称I/O接口
I/O接口在嵌入式系统中具有重要的位置
I/O接口组成
I/O接口组成
数据缓存
信号电平转换
数据格式转换
外设选择
中断管理
CPU命令接收和执行
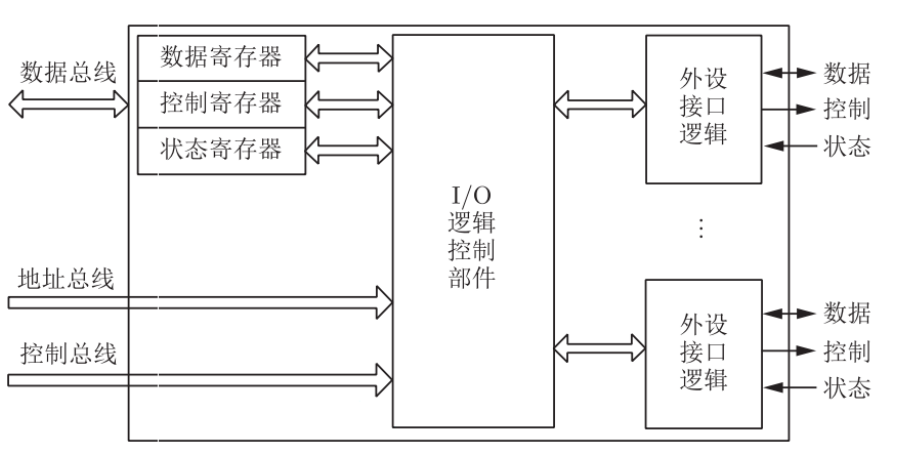
I/0接口的三个基本功能模块:数据缓存、逻辑控制和外设连接
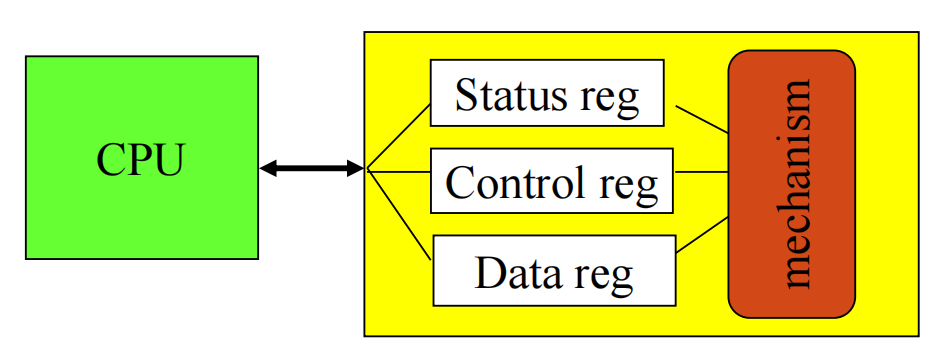
寄存器
数据缓存功能模块:负责I/O交互过程的控制、记录和数据的存储
- 数据寄存器:存放交互过程中需传输的数据
- 控制寄存器:存放外设、I/O接口的控制命令
- 状态寄存器:记录外设、I/O接口的状态信息
控制与外设
逻辑控制功能模块
- 接收CPU传输过来的地址,根据地址进行外设选择
外设连接功能模块
- I/O接口与外设的交互接口
I/O设备的分类
计算机所管理的I/O设备按输入输出对象的不同可以分为以下3类:
- 用户可读写设备,用于用户与计算机通信。如:显示器、键盘、鼠标、打印机等
- 机器可读写设备,用于电子装置与计算机通信。如:硬盘、U盘、控制器
- 通信设备,用于与远程设备通信。如:Modem、ISDN终端
二.数据传输
I/O接口的数据传输
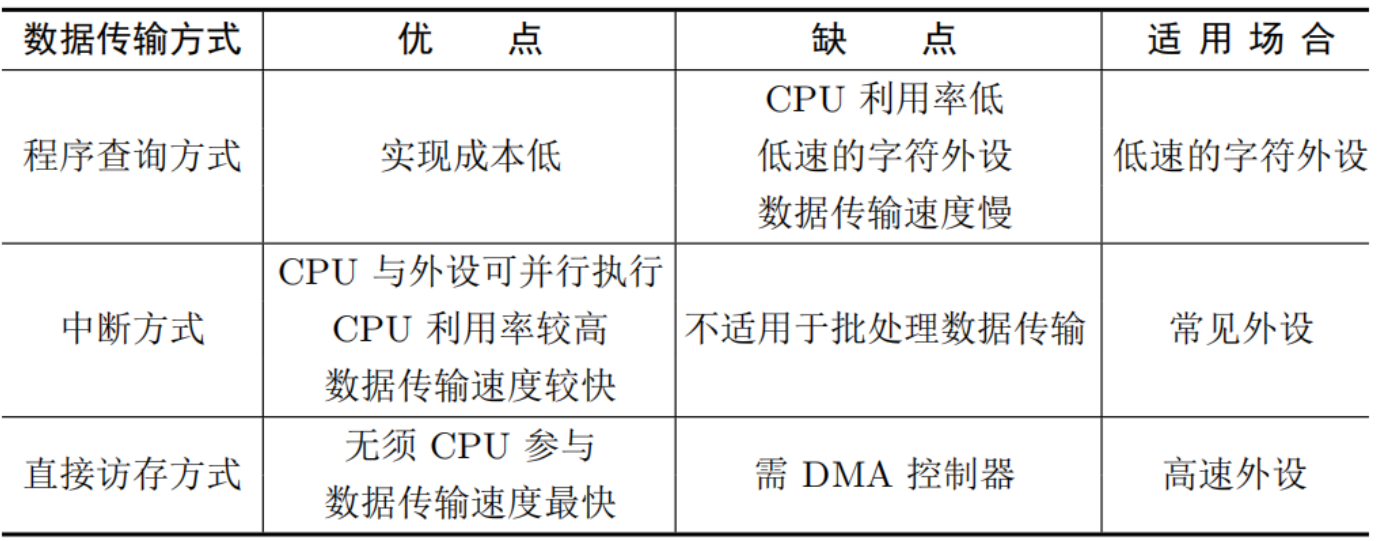
🔷程序查询方式,也称忙等I/O
CPU负责查询外设的状态寄存器,判断外设的数据是否就绪。若就绪,直接传输数据;否则,CPU等待数据就绪或继续查询其他外设
🔷中断方式
当外设数据就绪时,外设向CPU发出中断服务请求信号,CPU响应外设的中断服务请求,并处理中断请求
🔷直接访存方式,DMA
数据传输无需CPU的参与,在外设与内存之间建立直接的数据传输通道
I/O编程
两种方法支持I/O编程
特殊的I/O指令
- Intel x86 提供 in, out 指令
内存映射I/O
- 大多数CPUs 应用内存映射I/O
- 支持I/O 指令的CPU并不排除内存映射I/O
内存映射IO
为每一个I/O设备的寄存器提供地址
程序使用普通的CPU读写指令来与设备通信
为设备定义地址:
DEV1 EQU 0x1000
1 | |
内存映射IO-高级语言(PEEK和POKE函数)
- 读操作
int peek(char *location) {
return *location; }
- 写操作
void poke (char *location, char newval) {
(*location) = newval; }
程序查询方式,忙等I/O方式
轮询(polling):通过CPU反复读I/O设备状态寄存器来询问设备是否空闲
- 设备比CPU慢,需要多个周期完成一项工作
- 必须等待前一个操作完成后再进行下一个操作
- 比如CPU向设备写数据,即输出
- 通过读设备状态寄存器来询问设备是否空闲
- 若空闲,则写数据到数据寄存器
- 若忙,则等待。
忙等IO方式-输出设备编程
将一个字符串写到输出设备
1 | |
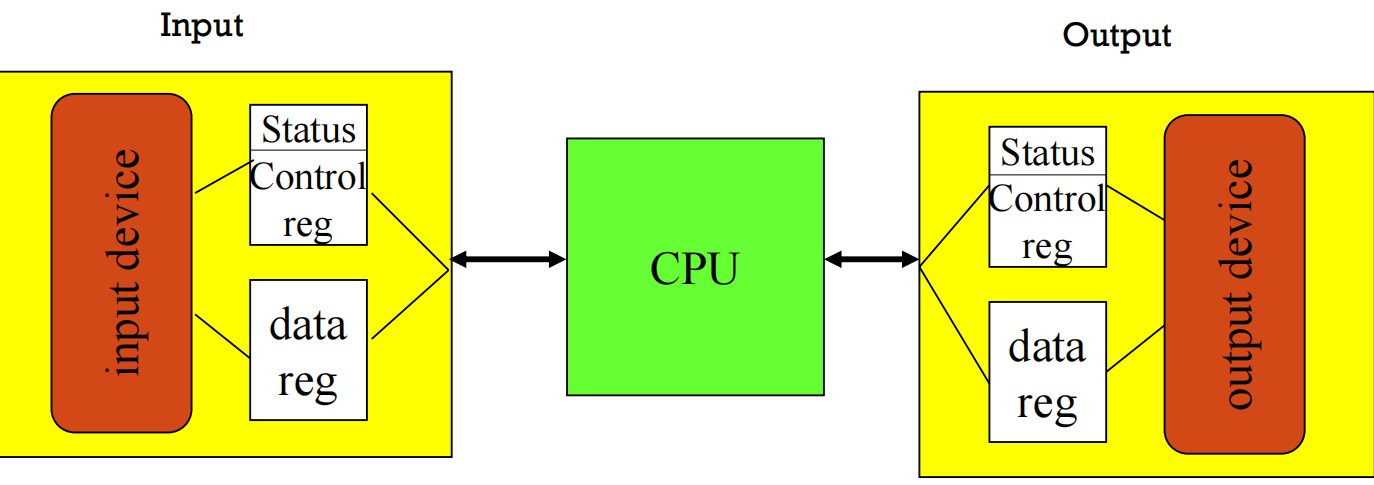
忙等IO方式-输入/输出同步方式编程
1 | |
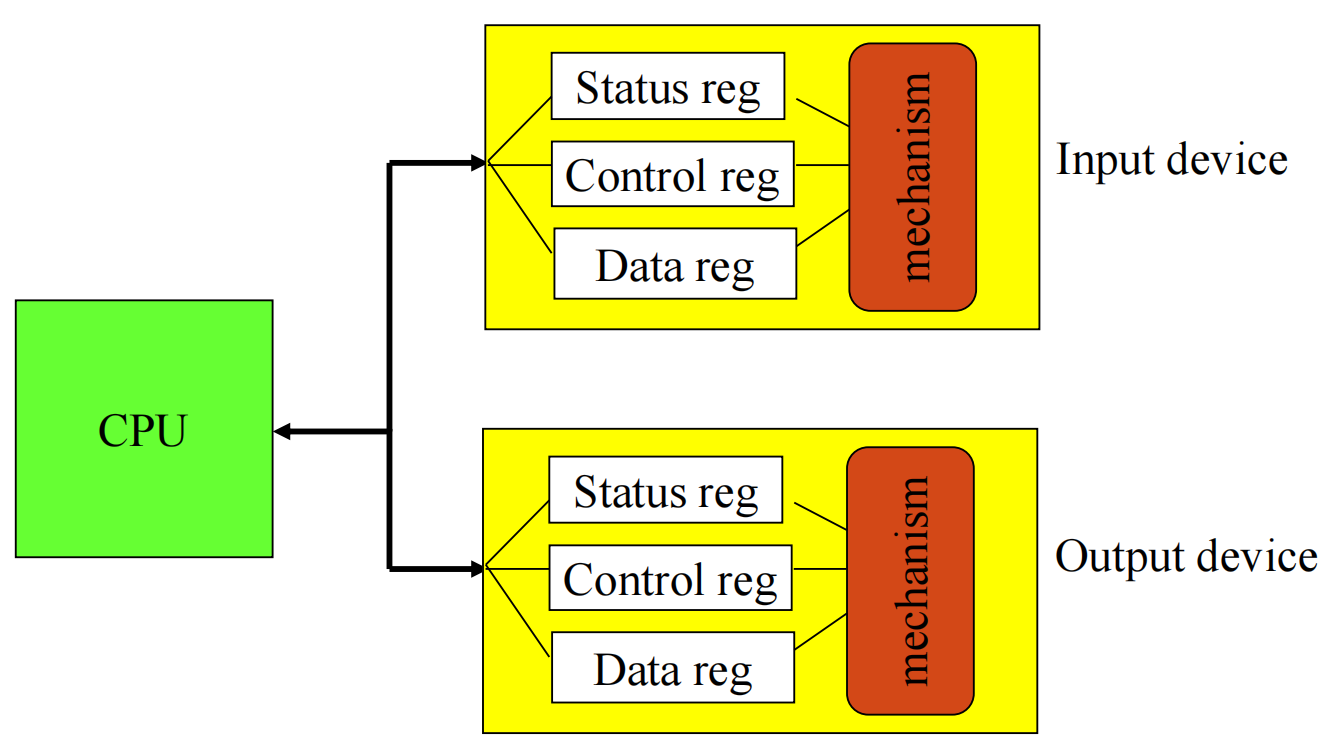
输入设备:
- 当有新字符能够被CPU读取, in_STATUS=1
- 当字符被CPU读取或无字符可读,in_STATUS==0
输出设备:
当CPU写入字符,有新字符能够被写入到输出设备
out_STATUS=1
当字符被输出设备读取或设备无字符可读
in_STATUS==0
1 | |
I/O中断
▪忙等I/O效率非常低
- I/O设备的速度远远小于CPU的速度
- 除了测试,CPU不能做其它任何事情
▪CPU的很多操作是可以与I/O并行执行
- 计算操作
- 控制其它I/O设备
▪中断机制:
- 可以改变CPU的控制流顺序
- 强制CPU执行一段特定代码——中断处理子例程(设备驱动程序)
▪ 由I/O设备逻辑决定什么时候中断,发中断请求
▪ CPU响应中断——可能无法立即响应
一旦响应,将程序计数器(PC)指向中断处理子例程
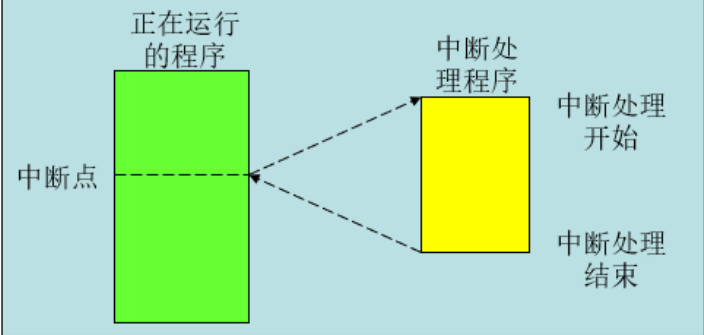
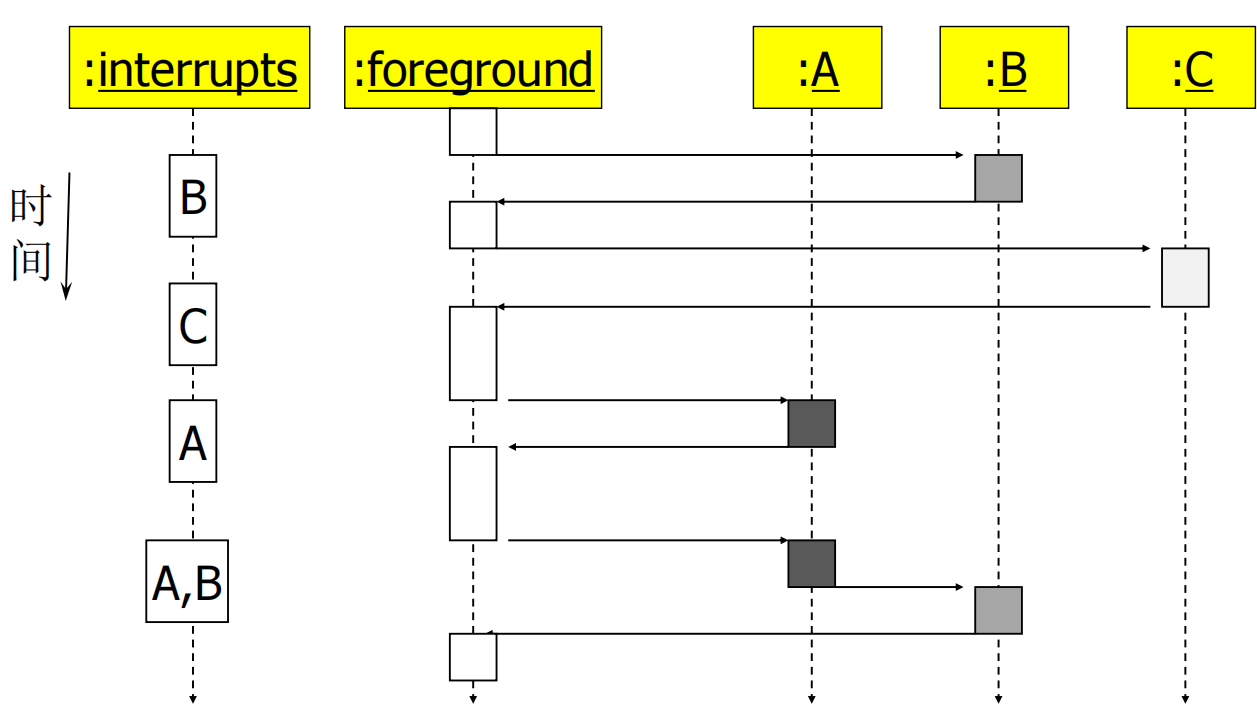
▪ 前台程序:无中断情况下CPU运行的程序
▪ 后台程序:中断处理子程序
中断机制
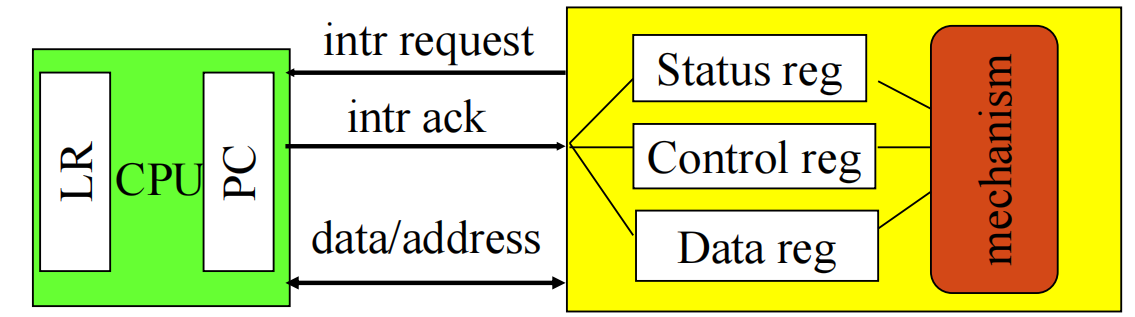
◼ CPU 和设备通过CPU总线连接
◼ CPU 和设备通过握手协议进行通信
- 设备发出中断请求
- CPU准备处理I/O设备请求时,CPU发出中断响应
中断行为
基于调用中断服务子例程的形式
- (保护现场)中断强制下一条指令调用中断服务子例程
- 执行中断子例程
- (恢复现场)返回前台程序
1 | |
例:具有缓冲区的中断IO
为了使读和写完全独立,使用缓冲区机制
- 允许输入输出设备以不同的速率运行
- 前台的工作完全独立于输入输出设备
- 通过输入中断、输出中断完成与I/O的通信
1 | |
1 | |
1 | |
调试中断代码
若忘记改变(或恢复)寄存器的内容
▪前台程序会展示一些非常奇怪的错误
▪错误很难重现—它依赖与中断
例:(handler()中一个错误应发j的改变)
1 | |
如何发现中断
- 在开始执行每条指令之前检查中断请求信号是否有中断请求
- 一旦出现中断,PC将指向中断服务子例程
- 注意:要保护和恢复现场
中断优先级和中断向量
- 两种机制允许中断处理更多的设备
- 优先级(Priorities):确定哪种中断首先获得CPU
- 向量(Vectors): 允许中断设备灵活定义其中断服务子例程
- 大多数CPU这两种方式都支持
具有优先级的中断
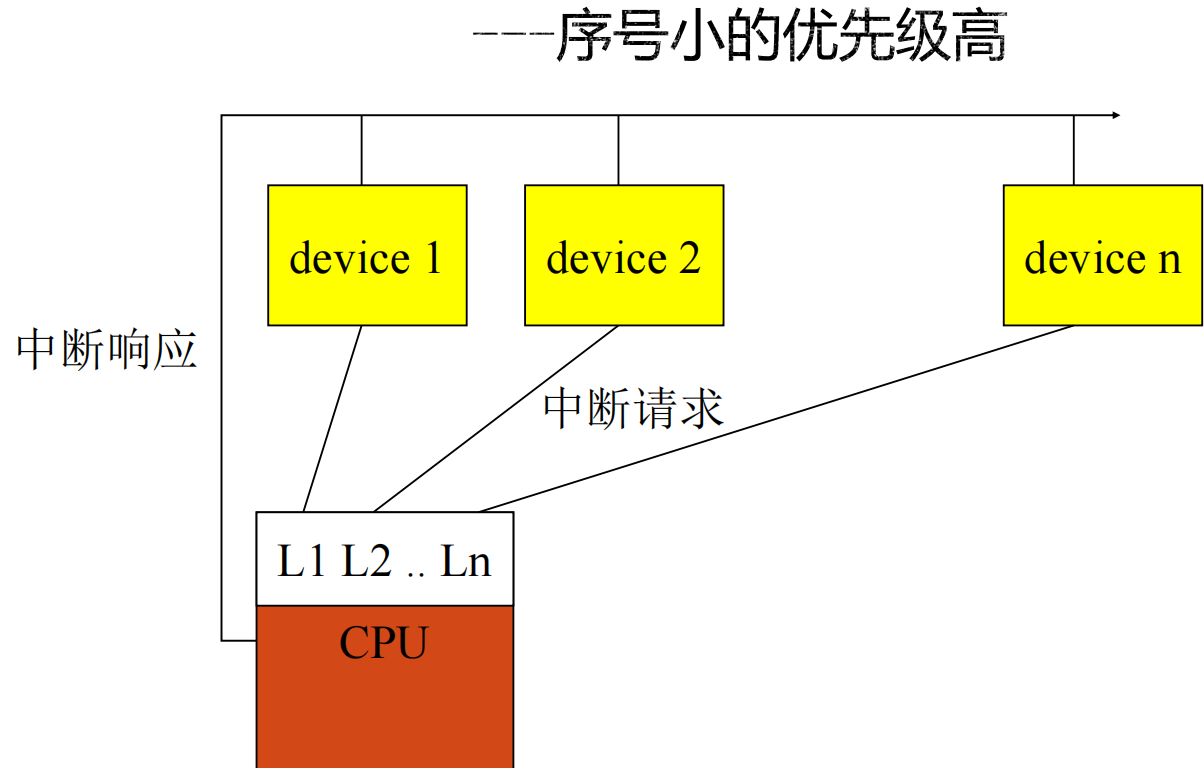
使用轮询让几个设备共享一个中断
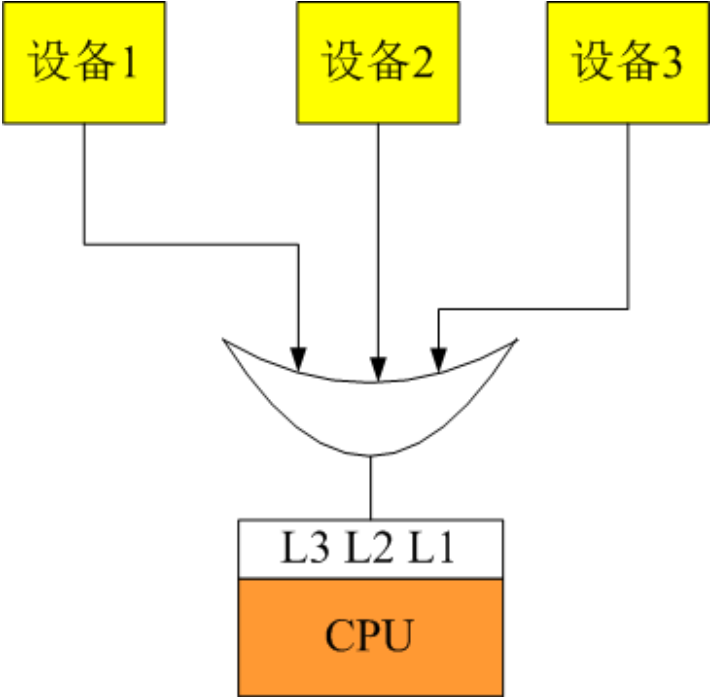
例: 优先级 I/O(A的优先级最高,C的优先级最低)
优先级排序:
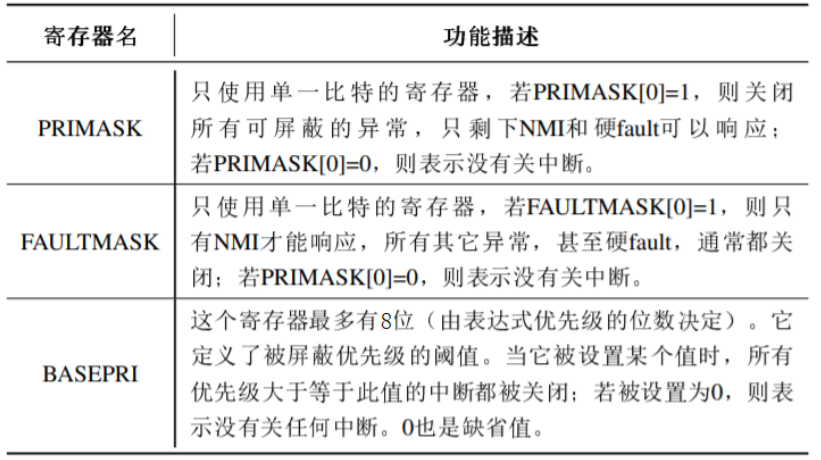
Masking(屏蔽): 发生中断的优先级比正在中断的优先级低,CPU将不响应该优先级低的中断。
Nonmaskable interrupt (NMI,不可屏蔽中断): 最高优先级,永不屏蔽
电源故障
中断向量
▪不同的设备有不同的中断服务子例程
▪中断向量表
-设备存贮其向量号
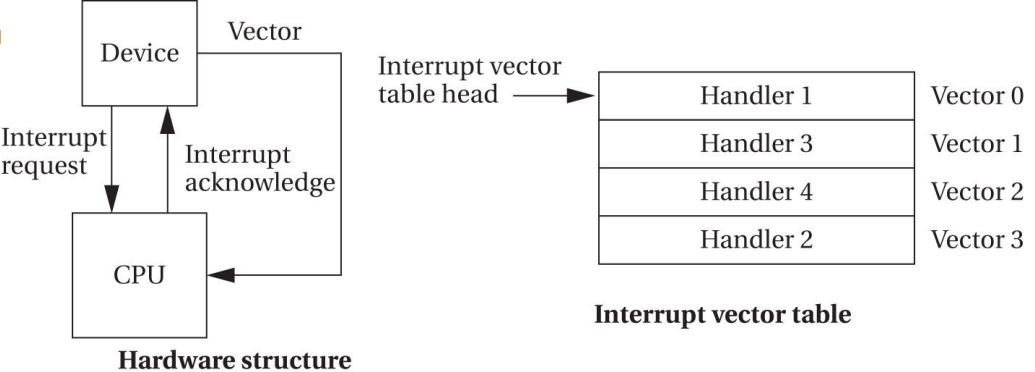
一般的中断机制
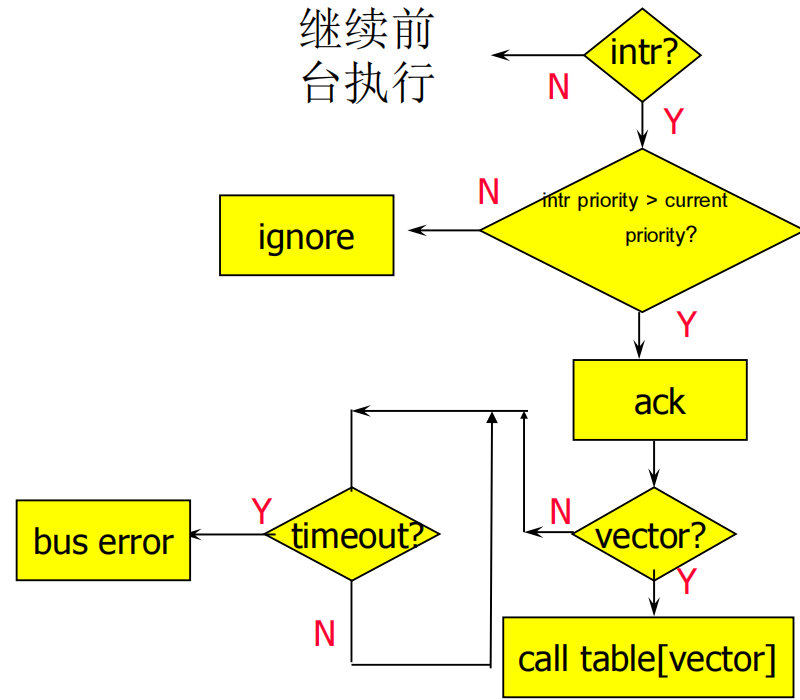
中断开销
- 中断服务子例程执行的时间
- 中断机制的开销
- 寄存器存储/恢复
- 流水相关补偿
- Cache相关补偿
IO接口传输对比
三.通信接口
用于实现外设与处理器之间的交互
- UART、SPI和I2C等
- 与 GPIO 的区别主要体现在通信时序、速度等方面
通信接口的分类
并行/串行通信
- 并行通信:外设和微处理器之间存在多根数据传输线,数据的多个比特位可同时传输,例IEEE1284,主要用于点阵式打印机和绘图仪
- 串行通信:外设和微处理器之间仅存在一根数据传输线,数据必须按照顺序一位一位传输,例如USB
同步/异步通信
- 同步通信:外设和微处理器之间有同步时钟,两者之间的数据传输受同步时钟的控制
- 采用阻塞模式,发送方发出数据后需接收到接收方响应后才发送下一个数据
- 例如IEEE1588标准,SPI,I2C
- 异步通信:外设和微处理之间没有同步时钟,借助缓存进行数据传输
- 异步通信过程中,通信双方必须约定通信协议和传输速率
- 采用非阻塞模式,即发送方发出数据后,无需等待接收方相应便可直接发送下一个数据
- 例如UART
单工/半双工/全双工通信(按照传输方向)
- 单工制式:数据只能从发送方往接收方传输
- 半双工制式:数据能在发送接收方之间双向传输,但在任何时刻数据只能一个方向传输,例如I2C
- 全双工制式:接收和发送数据占用不同的线路,因此数据可同时在两个方向上传输,例如UART

串行通信
▪ 使用方便、成本低廉、编程简单
▪ 各微处理器提供的常见串行通信接口:通用异步收发器(UART)
▪ STM32系列微处理器提供:通用UART和USART(同步/异步收发器接口)
USART优点
◼支持全双工、异步通信
◼采用分数波特率发生器,可配置,最高可支持10.5Mb/s波特
率
◼可编程配置的数据字长度(8 位或 9 位)
◼可配置的停止位(1 位或 2 位)
◼USART 实现同步数据通信时,发送端提供时钟
◼支持奇偶校验
◼发送奇偶校验位,接收数据奇偶校验
◼支持 4 种错误检测:溢出错误、噪声错误、帧错误和校验错误
◼……
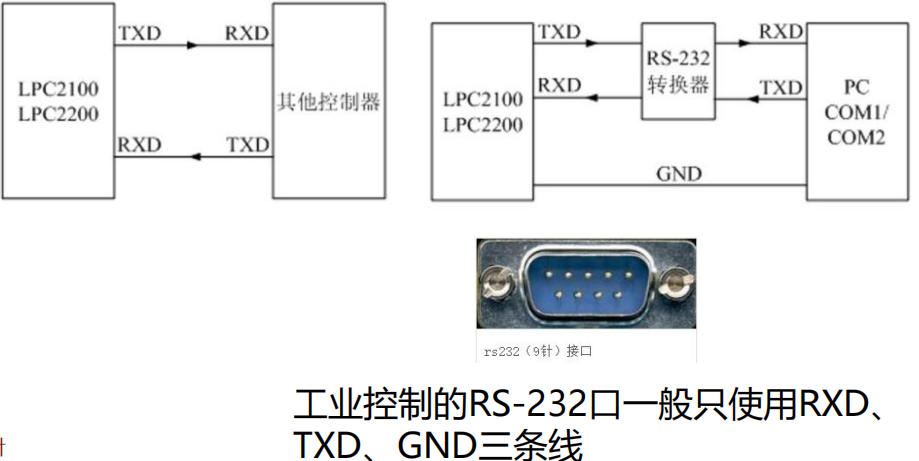
USART通信接口通过3个引脚与外设之间进行通信
- RX:接收数据输入
- TX:发送数据输出
▪ SW_RX:在单线和智能卡模式下,接收数据
▪USART与外设通信至少需要RX和TX两个引脚
▪USART的部分引脚仅用于同步模式,如SCLK、IrDA模式、硬件流量控制模式
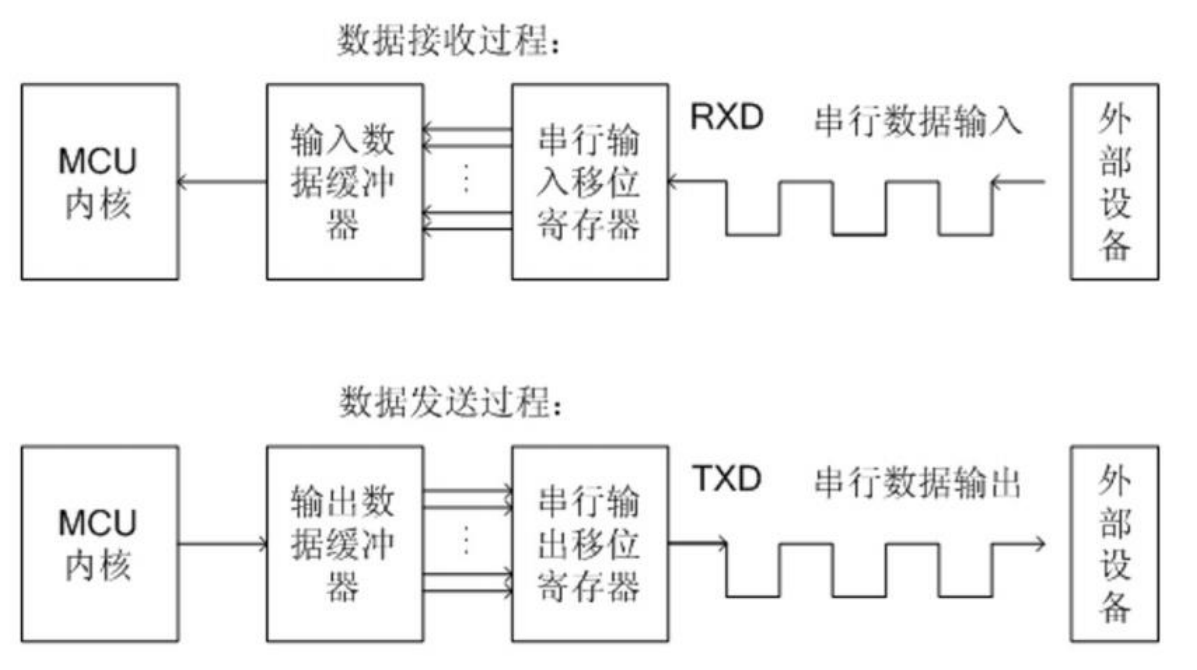
USART结构
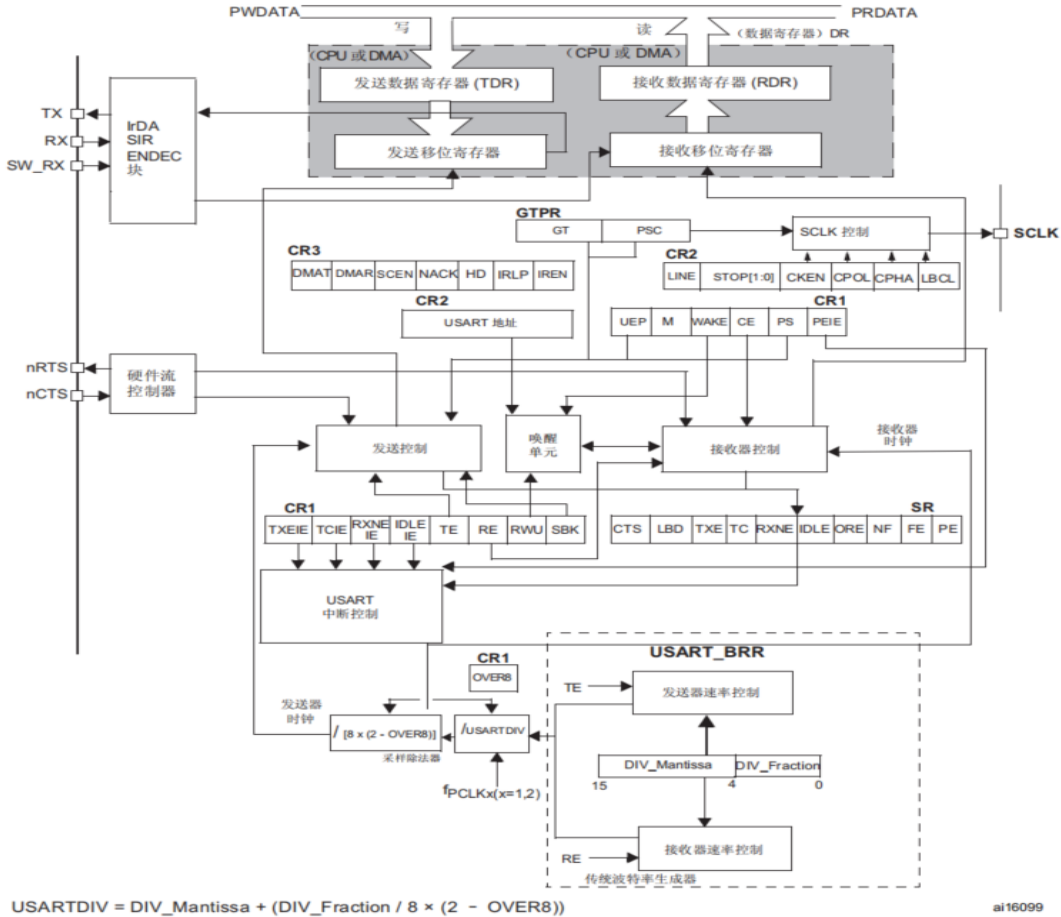
分数波特率计算
波特率寄存器(USART_BRR)A

▪位 31:16 保留
▪位 15:4 DIV_Mantissa[11:0]:USARTDIV 的整数部分
▪位 3:0 DIV_Fraction[3:0]:USARTDIV 的小数部分

▪ fck是给外设的时钟
▪设置波特率位115200,fck = 36MHz,则USARTDIV = 19.5
▪整数部分为19 << 4 = 304
▪小数部分为0.5*16 = 8
▪ USART_BRR寄存器的值位304+8=312=0x138
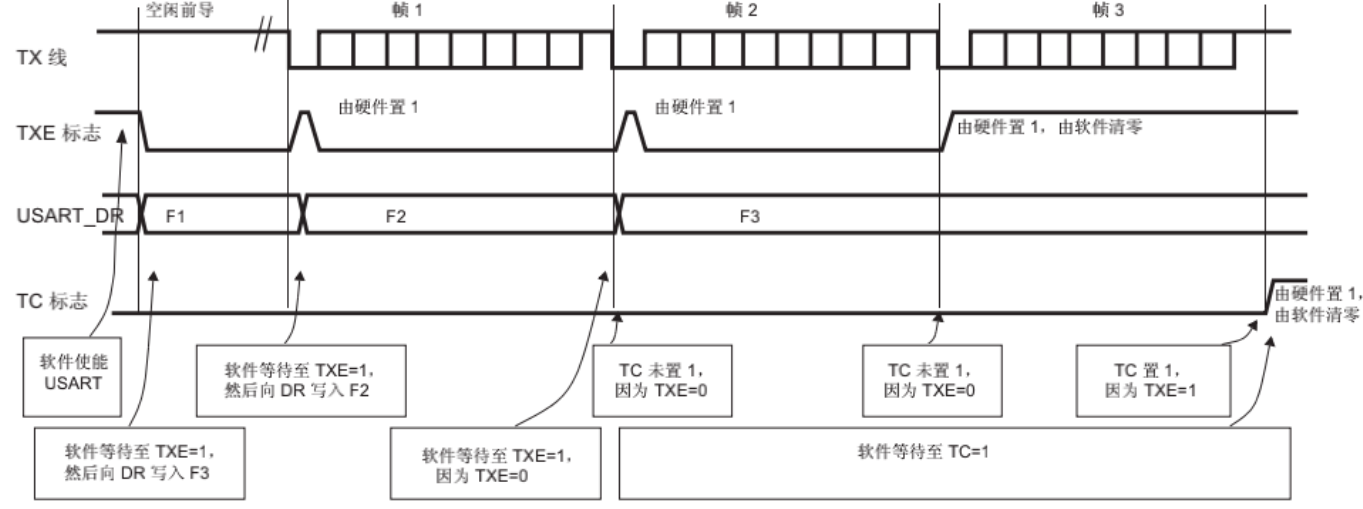
USART的数据发送过程
(1)写USART_CR1寄存器的UE位为1来使能USART
(2)写USART_CR1寄存器的M位来定义数据帧长度为8位或9位
(3)写USART_CR2寄存器的STOP来配置停止位
(4)如果采用多缓冲区通信的话,写USART_CR3寄存器的DMAT位来使能DMA传输,此时需按多缓冲区通信中的描述配置DMA寄存器
(5)写USART_BRR寄存器来配置波特率
(6)初次传输时需设置USART_CR1寄存器中的TE位来发送一个空闲帧
(7)把需传输的数据写到USART_DR寄存器,帧已发送(停止位后)且TXE 位置 1,可在单缓冲区通信时将重复进行此动作来进行数据传输
(8)在写入最后一个数据到USART_DR寄存器后,等待USART_SR寄存器的TC信号变为1,此时表明最后一个数据帧传输结束
USART的数据接收过程
(1)写USART_CR1寄存器的UE位为1来使能USART
(2)写USART_CR1寄存器的M位来定义数据帧长度为8位或9位
(3)写USART_CR2寄存器来的STOP配置停止位
(4)如果采用多缓冲区通信的话,写USART_CR3寄存器的DMAT位来使能DMA传输,此时需按多缓冲区通信中的描述配置DMA寄存器
(5)写USART_BRR寄存器来配置波特率
(6)写USART_CR1寄存器中的RE位使能数据接收。当接收到一个数据帧时,USART_SR寄存器中的RXNE位被设置,此时表明移位寄存器中的数据传输到了RDR,数据帧可以被录取
SPI
串行外设接口(Serial Peripheral Interface,SPI)
▪ 同步串行通信接口,主要用于微处理器与外设之间的串行通信
▪ 高速、全双工、同步,占用4个引脚 -> 节约芯片引脚
(1)MISO引脚:主设备数据输入,从设备数据输出
(2)MOSI引脚:主设备数据输出,从设备数据输入
(3)SCLK引脚:时钟信号,由主设备产生
(4)CS引脚:从设备片选信号,由主设备控制
▪ SPI是一种不对等的通信接口,通信的发起、结束均由主机控制,SPI通信双方时钟产生和片选控制的一方即为主机
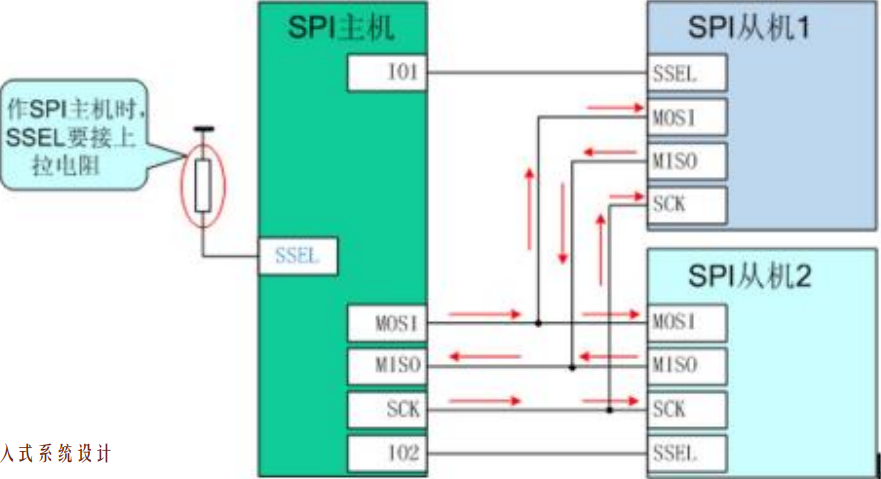
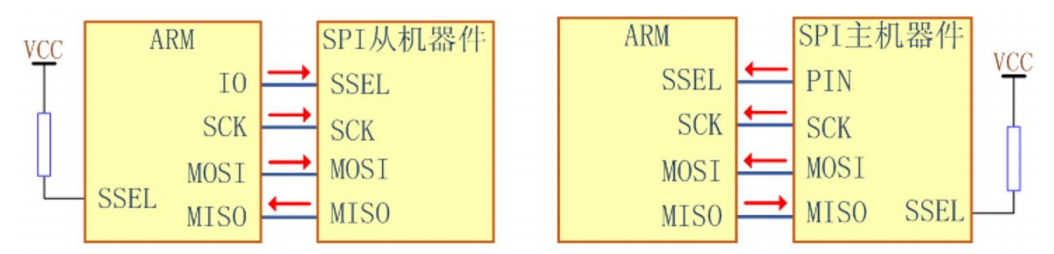
spi的硬件连线图
一个SPI总线可连接多个主机和多个从机,但是在同一个时刻只允许由一个主机来操作总线
在每次传输的过程中,主机总是向从机发送一个字节的数据,从机也是向主机发送一个字节的数据
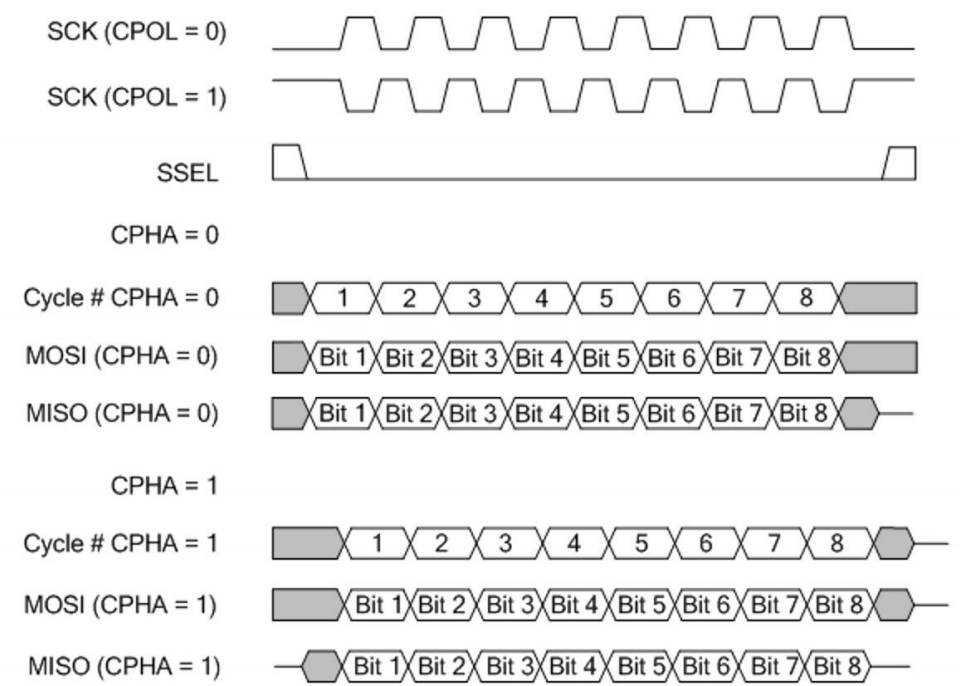
spi工作方式
SPI接口可根据外设通信的需求,对串行同步时钟的极性(CPOL)和相位(CPHA)进行配置
- CPOL对SPI接口的通信影响不大,CPOL=0,串行同步时钟的空闲状态为低电平;CPOL=1,串行同步时钟的空闲状态为高电平
- CPHA决定了SPI接口上数据的采样位置,CPHA=0,在串行同步时钟的第一个跳变沿数据将被采样;CPHA=1,在串行同步时钟的第二个跳变沿数据才被采样;
SPI接口可根据外设通信的需求,对串行同步时钟的极性(CPOL)和相位(CPHA)进行配置
SPI内部结构
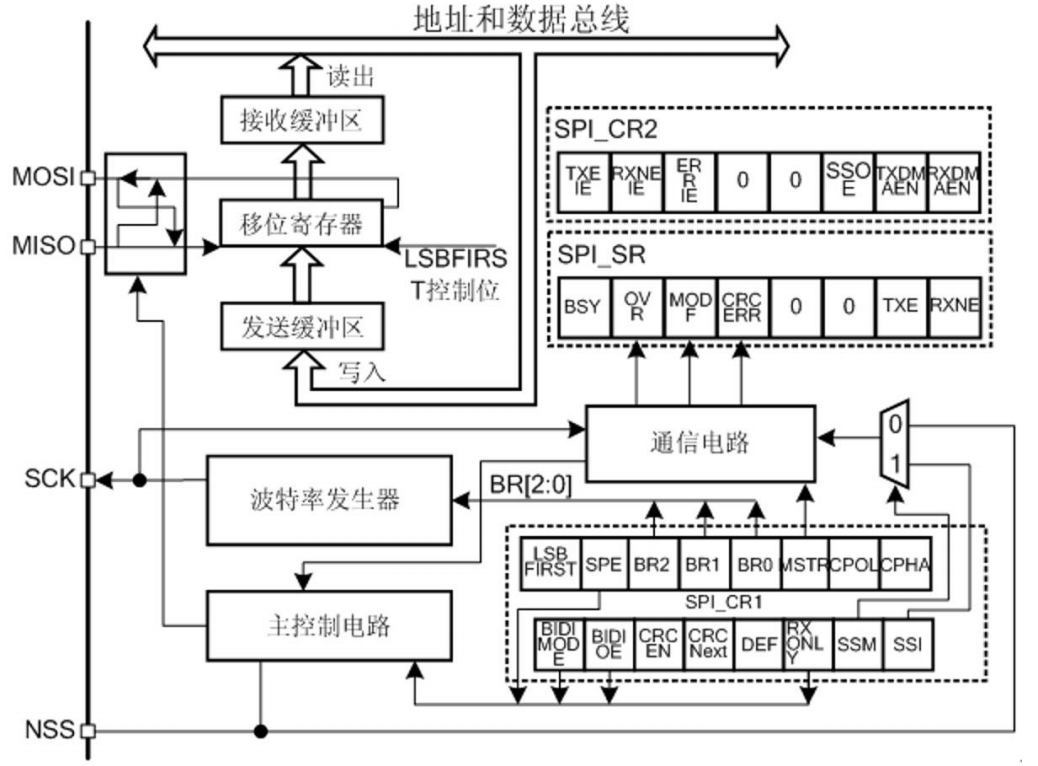
SPI寄存器
SPI寄存器:通过SPI_CR1寄存器的配置来设置SPI的

工作模式-主机模式和从机模式
在主机模式下
- 主机使用一个IO引脚选择从机
- 传输的起始由主机发送数据来启动
- 时钟(SCK)信号由主机产生
- 通过MOSI引脚发送数据
- 通过MISO引脚接收数据
在从机模式下
- 数据传输在SSEL被主机拉低后开始
- 接收主机输出的时钟信号
- 通过MOSI引脚接收数据
- 通过MOSI引脚发送数据
SPI的从模式配置
配置SPI为从模式的过程(SCK引脚用于接收主机的串行时钟)
(1)设置DEF位来定义数据帧格式(8位或16位)
(2)设置CPOL位和CPHA位来定义数据传输和串行时钟之间的相位关系,保持主机和从机CPOL位和CPHA位的一致
(3)保持主机和从机帧格式的一致
(4)在通信的过程中,必须保证CS片选信号处于低电平
(5)清除MSTR位,设置SPE位使相应引脚处于SPI工作模式
从模式下的数据传输
- 数据发送过程:在写操作过程中,数据字被并行写入发送缓冲器;当从设备收到时钟信号并且在MOSI引脚上出现第一个数据位时,发送过程开始,剩下的数据位被写入移位寄存器;当发送缓冲器中的数据字写入移位寄存器时,SPI_SP寄存器的TXE位被置位,如果设置了SPI_CR2寄存器中的TXEIE位,将触发中断
- 数据接收过程:当数据接收完成时,移位寄存器中的数据传输到接收缓冲器中,SPI_SR寄存器中的RXNE标志位被置位,如果设置了SPI_CR2寄存器中的RXNEIE位,将触发中断
- 在最后一个采样时钟边沿后,RXNE位被置位,移位寄存器中的数据字被写入接收缓冲器。当读SPI_DR寄存器时,SPI设备返回接收缓冲器接收到的数据字
SPI的主模式配置
配置SPI为主模式的过程(SCK引脚用于产生时钟信号)
(1)通过SPI_CR1寄存器的BR[2:0]位定义串行时钟波特率
(2)设置CPOL位和CPHA位来定义数据传输和串行时钟之间的相位关系
(3)设置DEF位来定义数据帧格式(8位或16位)
(4)设置SPI_CR1寄存器的LSBFIRST位来定义帧格式
(5)在通信的过程中,必须保证CS片选信号处于高电平
主模式下的数据传输
- 数据发送过程:当写入数据到发送缓冲器时,发送过程开始;当发送第一个数据位时,数据被并行写入移位寄存器,然后串行地移出到MOSI引脚;数据字的高位在前还是低位在前传输,取决于SPI_SP寄存器的LSBFIRST位的配置;当数据字从发送缓冲器写入移位寄存器时,SPI_SP寄存器的TXE位被置位,如果设置了SPI_CR2寄存器中的TXEIE位,将触发中断
- 数据接收过程:当数据传输完成时,移位寄存器中的数据字被写入接收缓冲器,并且SRXNE标志位被置位,如果设置了SPI_CR2寄存器中的RXNEIE位,将触发中断;在最后采样时钟边沿,RXNE位被置位,移位寄存器接收到的数据字被写入缓冲器。读SPI_DR寄存器时,SPI设备返回接收缓冲器接收到的数据字,RXNE位被清除
- 一旦数据传输开始,如果下一个将要发送的数据字被写入了发送缓冲器,就可以维持持续的数据字传输。在写发送缓冲器之前,需确认TXE标志位是否被置位
I2C
串行通信总线(Inter-Integrated Circuit,I2C)概述
双向数据传输,传输速度0~100Kbps,高速模式达0~400Kbps
简单灵活可扩展,总线中的所有设备仅有唯一地址,通过软件寻址
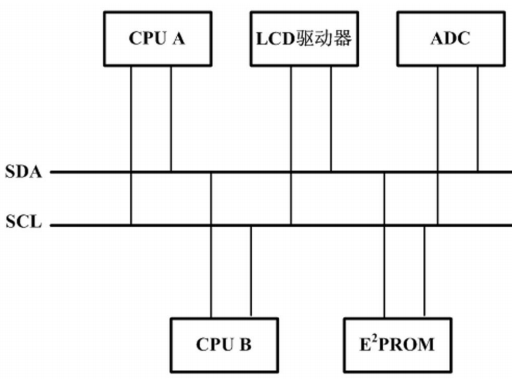
➢ 总线上可同时连接多个能控制总线的设备
➢ 只能有一个控制设备获得总线控制权而成为主机
➢ 总线系统能同步所有控制设备所产生的时钟信号
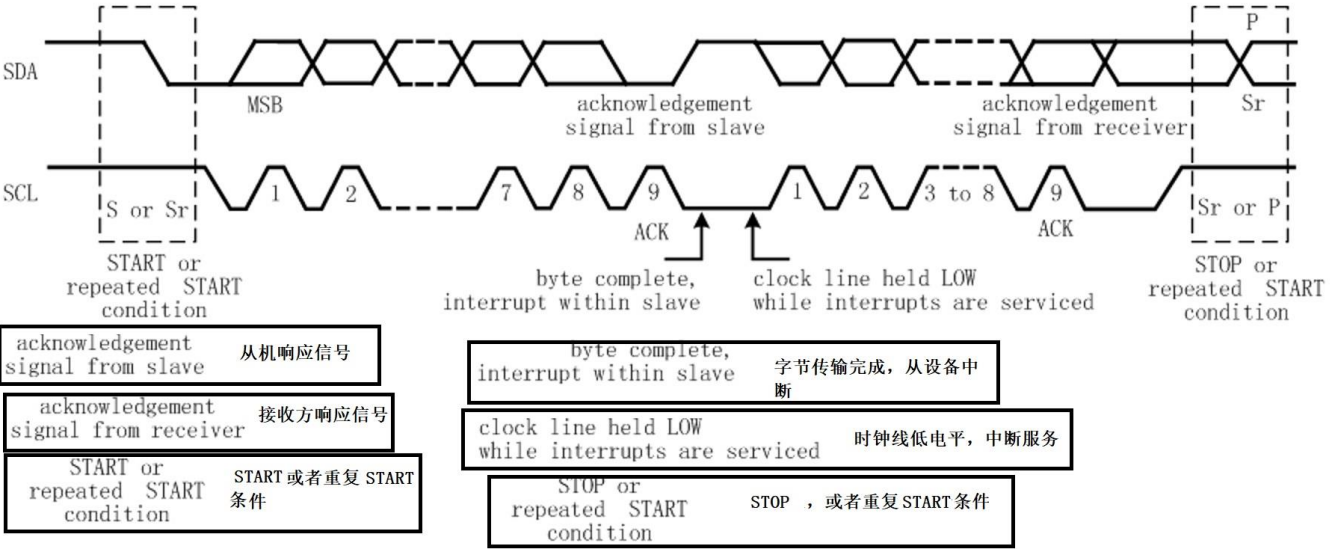
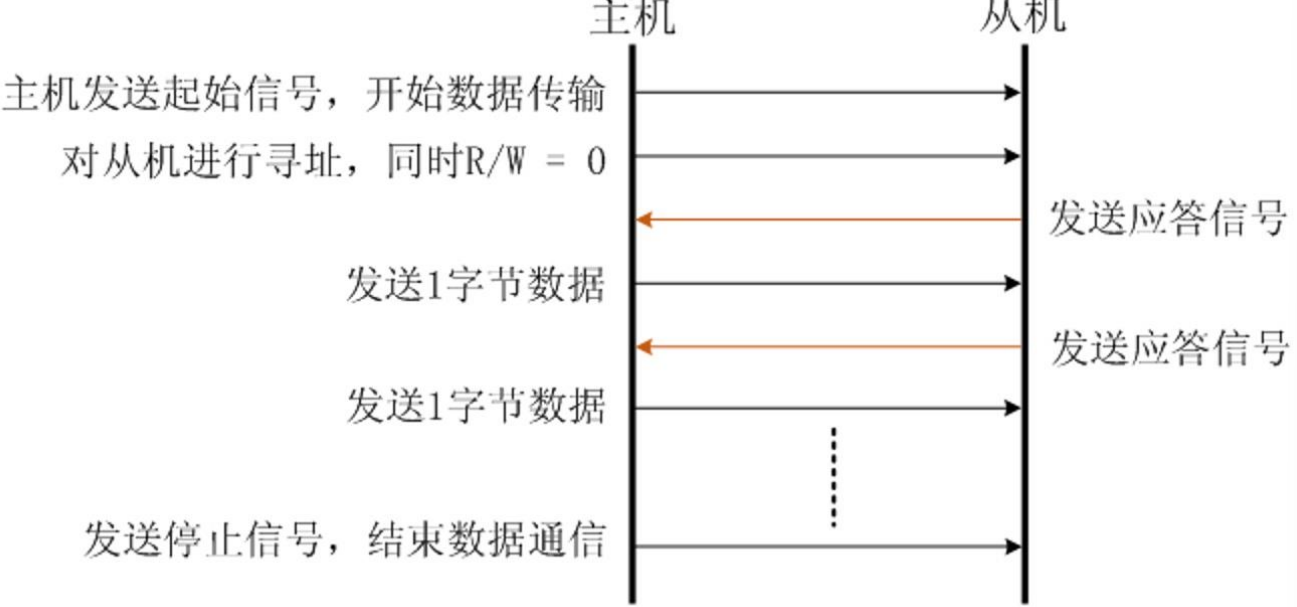
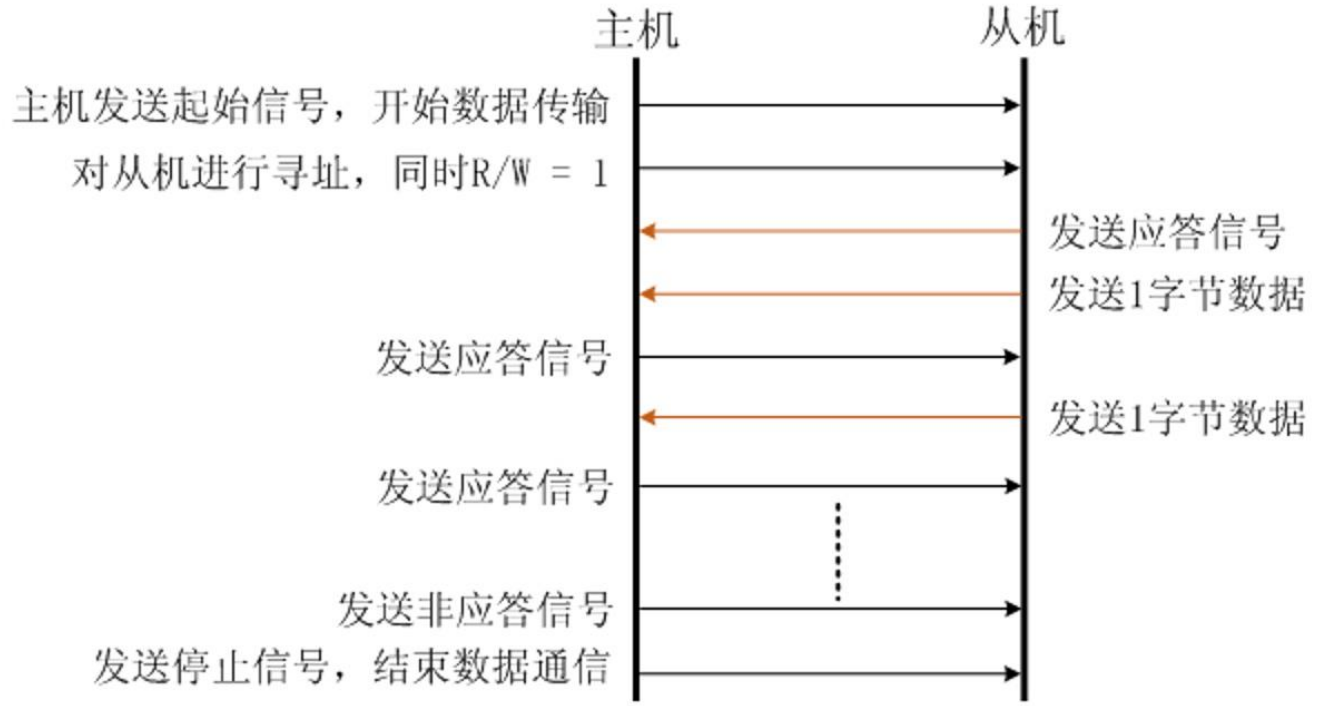
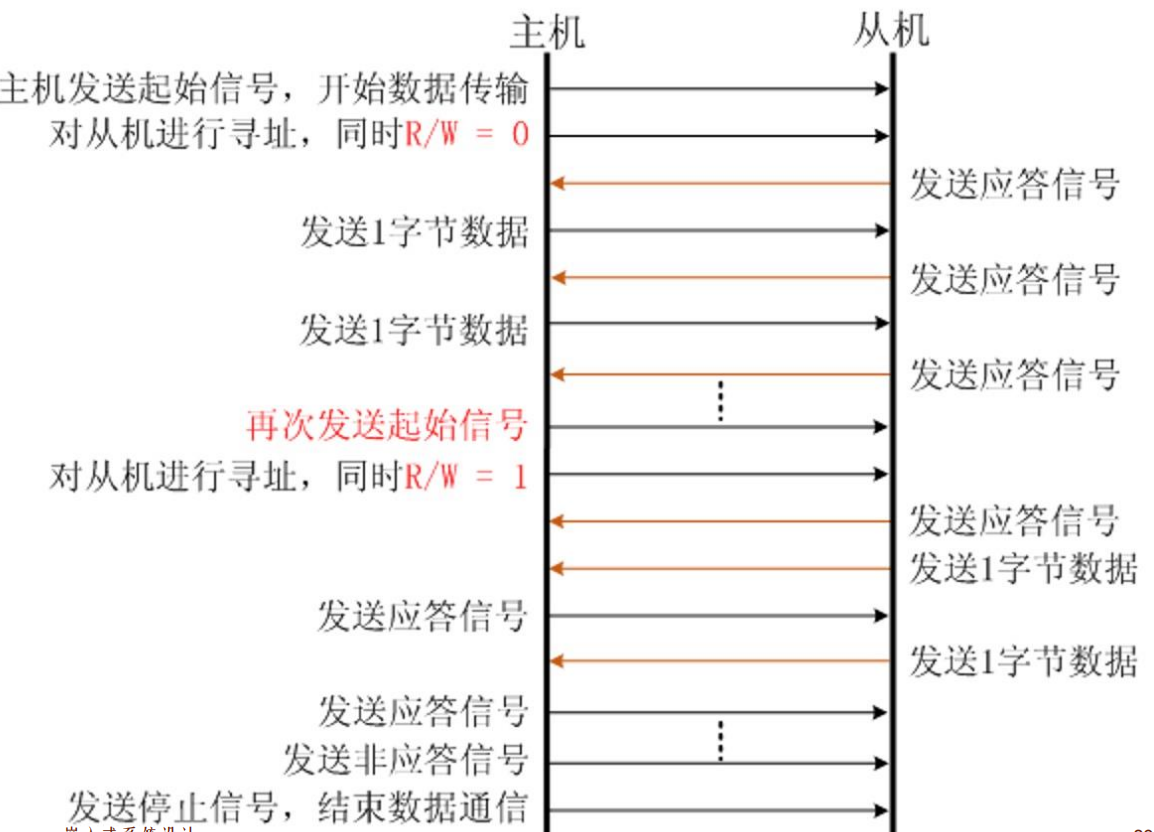
I2C数据传输
- I2C总线上每传输一个数据位必须产生一个时钟脉冲,通信双方之间每次发送一个字节的数据
- SDA线上的数据必须在时钟线SCL的高电平期间保持稳定,SDA线的电平状态只有在SCL线的时钟信号为低电平时才能发送改变
- I2C总线上的4种信号
- 起始信号:SCL为高电平,SDA由高跳变低,开始数据传输
- 停止信号:SCL为高电平,SDA由低跳变高,终止数据传输
- 应答信号:接收器向发送器发出特定的低电平脉冲信号,表示已经接收到数据
- 非应答信号:主机向从机发送一个高电平有效脉冲信号,表示接收完最后一个数据字节,使从机释放数据线
四.人机交互-LCD
液晶显示器(Liquid Crystal Display,LCD)是一种被动的显示器材,本身不能发光,需借助于周围环境的光
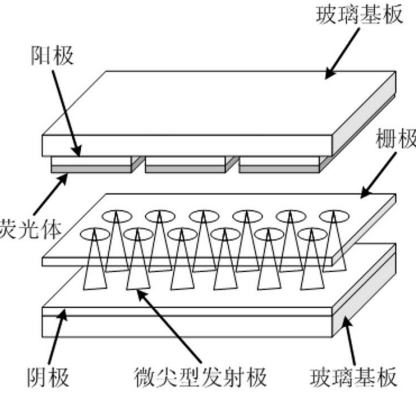
LCD的基本原理
- LCD将液晶置于两个导电玻璃之间,通过两个电极间电场的驱动引起液晶分子有规则地旋转形成扭曲角,发生扭曲向列效应,从而控制投射光的强度
- 完全投射即白色,完全阻挡即黑色,不同投射程度呈现不同的灰阶
- LCD分类:根据工作原理,将LCD划分为扭曲向列型液晶TN-LCD、超扭曲向列型液晶STN-LCD和薄膜晶体管液晶TFT-LCD
LCD显示的控制方法
LCD的两种驱动方式
- 扫描驱动的LCD驱动器:将显示缓存中的图像数据通过动态扫描的方式传输到LCD显示屏
- 总线驱动的液晶模块(LCD Module,LCM):将液晶显示屏、连接件、驱动和控制集成电路、PCB线路板、背光源等装配在一起的显示控制器
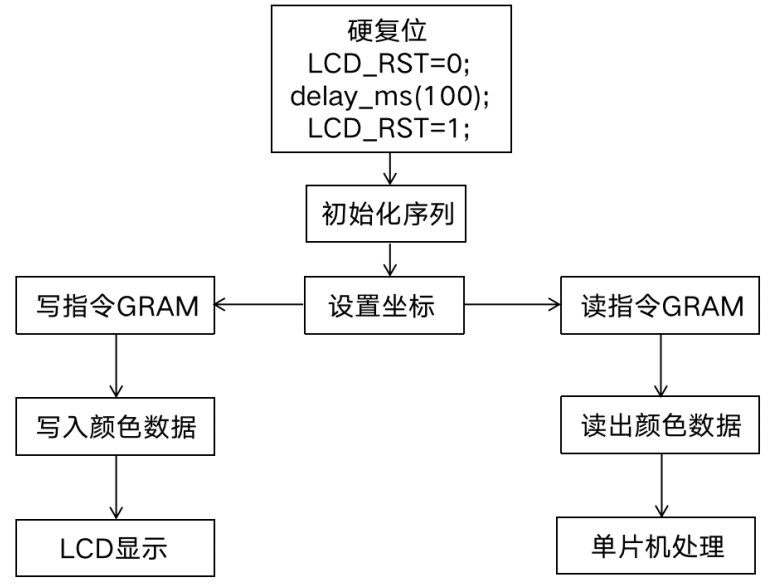
TFT-LCD的LCM内置有与液晶像素点对应的显示数据RAM区,若要改变一个像素点的颜色,只需对该点所对应的16位显存进行操作即可
TFT-LCD模块的两种操作:对控制寄存器的读/写操作、对显存的读/写操
两种操作均通过对ILI9341的寄存器的操作来完成
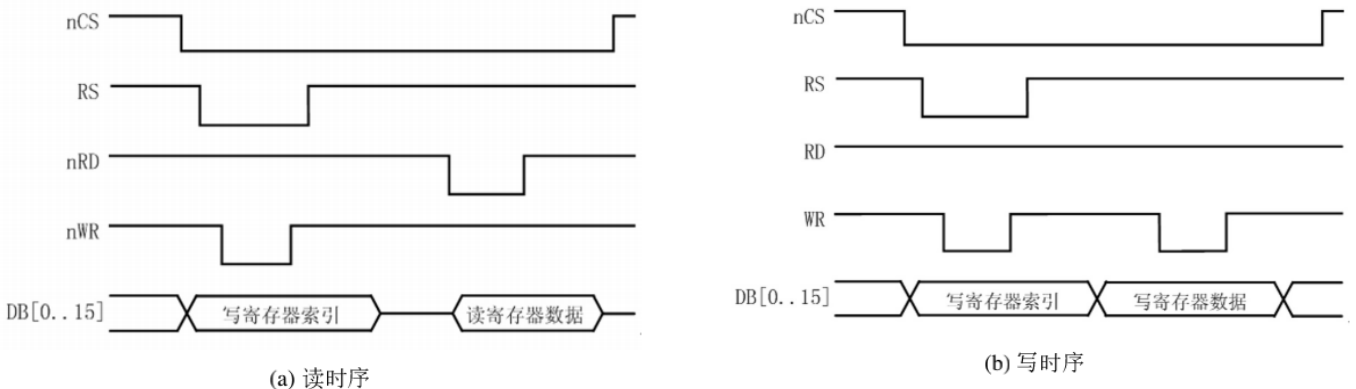
TFT-LCD的使用:当对TFT-LCD显示面板上的某一点(X,Y)
进行操作时,需要先通过地址定位到该点所对应的RAM显存地址,然后通过光标的上下左右移动的控制来连续写入或读取显存数据
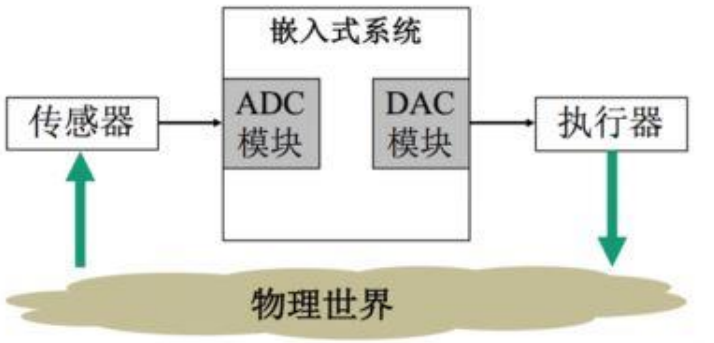
六.ADC/DAC
- 模数转换器(Analog-to-Digital Converter,ADC)负责将物理环境中的模拟信号(连续物理量)转换为计算机可处理的数字信号(离散数字量)
- 数模转换器(Digital-to-Analog Converter,DAC)负责将数字信号还原为模拟信号
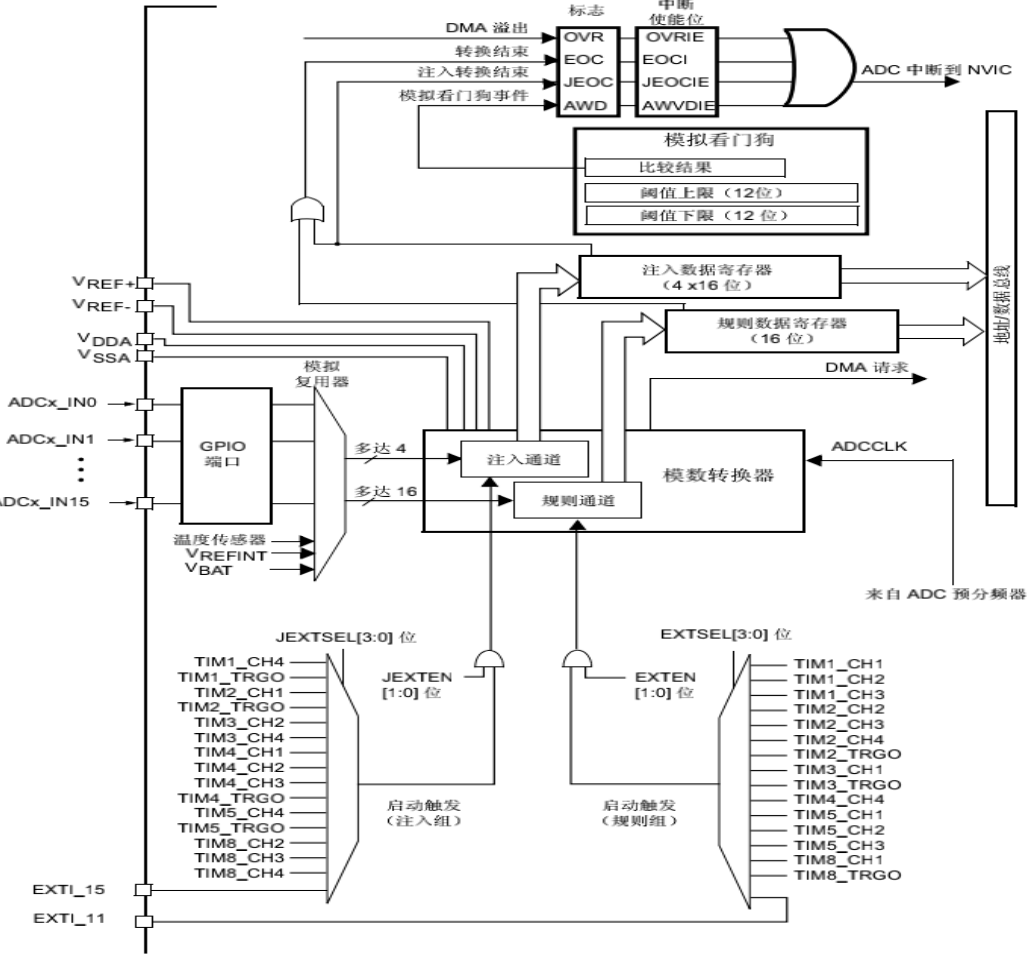
ADC接口的内部结构
- ADC一般经过取样、保持、量化和编码4个过程,并且4个往往同时实现
- ADC转换分为两个通道组:规则通道组和注入通道组
- 规则通道组相当于正常运行的程序,而注入通道组相当于中断。在正常执行程序的时候,中断可以打断其执行
Cortex-M4处理器的ADC结构
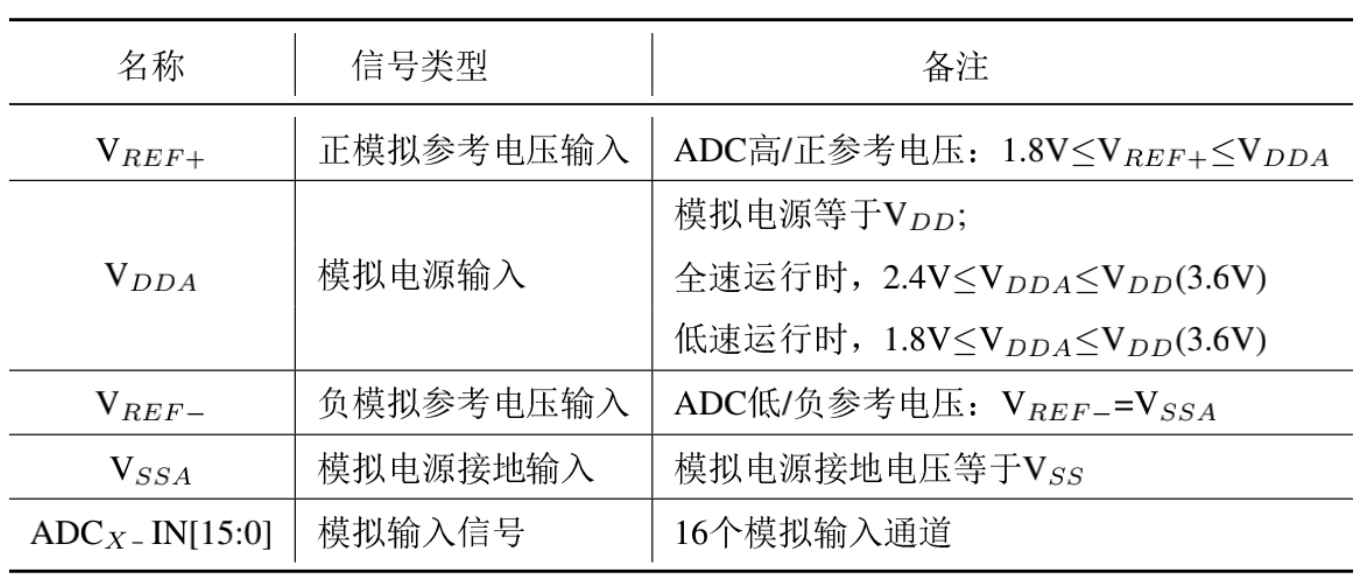
- 12位逐次逼近模数转换器,支持19路信号输入,分别是16路外部信号(ADCx_IN0~ADCx_IN15)、2路内部信号(温度传感器和VREFINT)和VBAT电源信号
- Cortex-M4处理器中一个规则通道组最多支持16路转换输入,一个注入通道组最多支持4路转换输入
CORTEX-M4处理器的ADC特点
- 多种分辨率
- 中断的产生
- 单转换模式/连续转换模式
- 扫描模式的自动切换
- 间隔采样模式
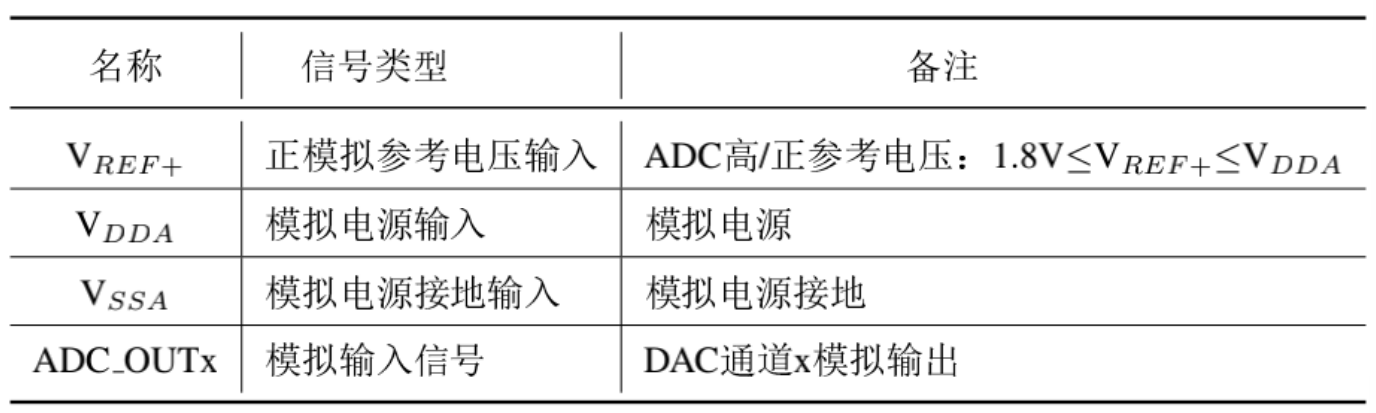
ADC的引脚描述
ADC功能
- 启动与时钟
- 时序
- 单次转换模式
- 连续转换模式
- 扫描模式
- 注入通道管理
- 间断模式
- 快速转换模式
- 校准
- 数据对齐
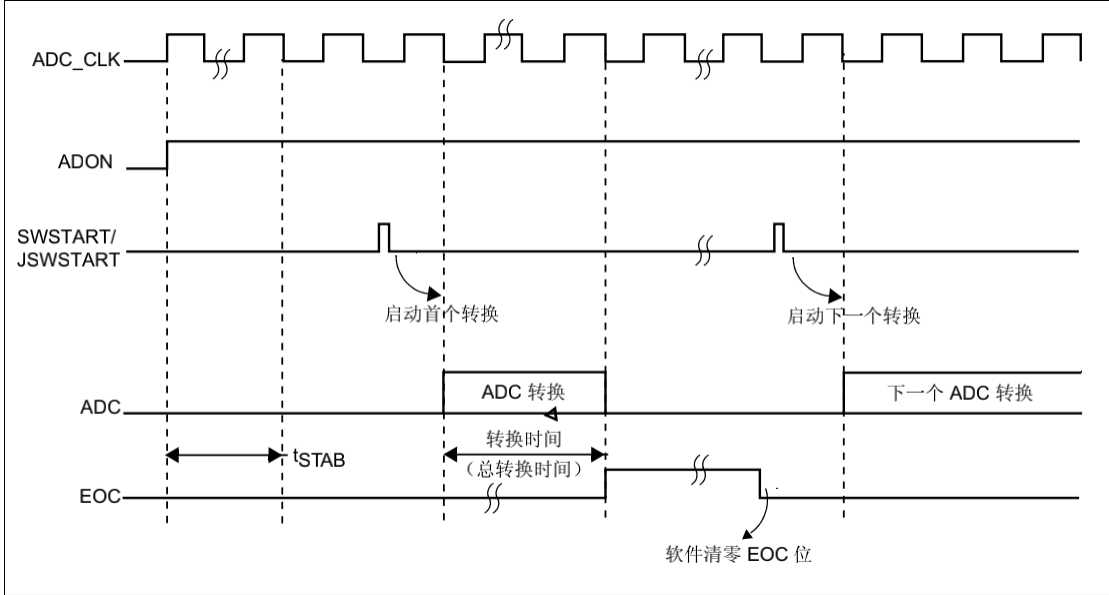
启动与时钟
ADC_CR2寄存器中的ADON位决定ADC接口的供电与掉电;SWSTART或JSWSTART位置1可启动ADC转 换
ADC的两种时钟方案
- ADCCLK时钟用于模拟电路,可供所有ADC连接公用。RCC控制器位ADC时钟提供一个专用的可编程预分频器,ADCCLK时钟可通过APB2分频来得到
- 用于数字接口的时钟,等同于APB2时钟。可通过RCC APB2外设时钟使能寄存器分别为每个ADC使能/禁止数字接口时钟
时序
ADC在开始精确转换之前需要一段稳定时间tSTAB。ADC开始转换并经过15个时钟周期后,EOC标志置1,转换结果将存放在16位ADC数据寄存器中
单次转换模式
ADC仅执行一次转换,完成后ADC停止
单次转换模式的启动方式
(1)将ADC_CR2寄存器中的SWSTART位置1(适用于规则通道)
(2)将JSWSTART位置1(适用于注入通道)
(3)外部触发(同时适用于规则/注入通道)
完成所选通道的信号转换之后
- 如果规则通道完成转换:转换数据存储在16位ADC_DR寄存器中;EOC转换结束标志位置1;EOCIE位置1时产生中断
- 如果注入通道完成转换:转换数据存储在16位ADC_JDR1寄存器中;JEOC转换结束标志位置1;JEOCIE位置1时产生中断
连续转换模式
ADC一次转换结束后立即启动下一次的转换
- 该模式通过外部触发或ADC_CR2寄存器中的ADON位启动
- 每次规则通道完成转换:转换数据存储在16位ADC_DR寄存器中;EOC转换结束标志位置1;EOCIE位置1时产生中断
注:注入通道一般不能采用连续转换模式,唯一的例外情况是注入通道配置为在规则通道之后自动转换时
扫描模式/注入通道管理/间断模式
扫描模式:用来扫描一组模拟通道,通过设置ADC_CR1寄存器的SCAN位来选择
注入通道管理
- 触发注入:清除ADC_CR1寄存器中的JAUTO位,并设置SCAN 位
- 自动注入:如果设置了JAUTO位,在规则组通道转换完成之后,注入组通道将自动启动转换
间断模式
- 规则组:间断模式通过设置ADC_CR1寄存器的DISCEN位激活
- 注入组:间断模式通过设置ADC_CR1寄存器的JDISCEN位激活
快速转换模式
▪降低ADC分辨率(转换精确度)可以提高转换速度
▪RES位用于选择数据寄存器中可用的位数
▪各种分辨率对应的最小转换时间计算方法
- 12位:3+12=15 ADCCLK周期
- 10位:3+10=13 ADCCLK周期
- 8 位:3+8=11 ADCCLK周期
- 6 位:3+6=9 ADCCLK周期
▪总转换时间的计算公式
Tconv=采样时间+12个时钟周期
校准
- 由于ADC接口中会因内部电容器组的变化而造成转换精确度误差,ADC内置自动校准模式
- 通过设置ADC_CR2寄存器中的CAL位启动校准,校准结束CAL位将被硬件复位,随后ADC可开始正常转换
- 校准结束后,校准码存储在ADC_DR寄存器中
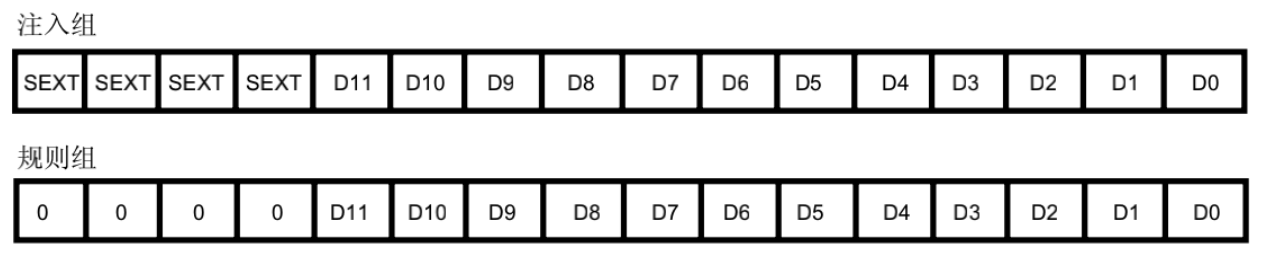
数据对齐
ADC_CR2寄存器中的ALIGN位用于选择转换得到数据的存储对齐方式,数据可以左对齐或右对齐

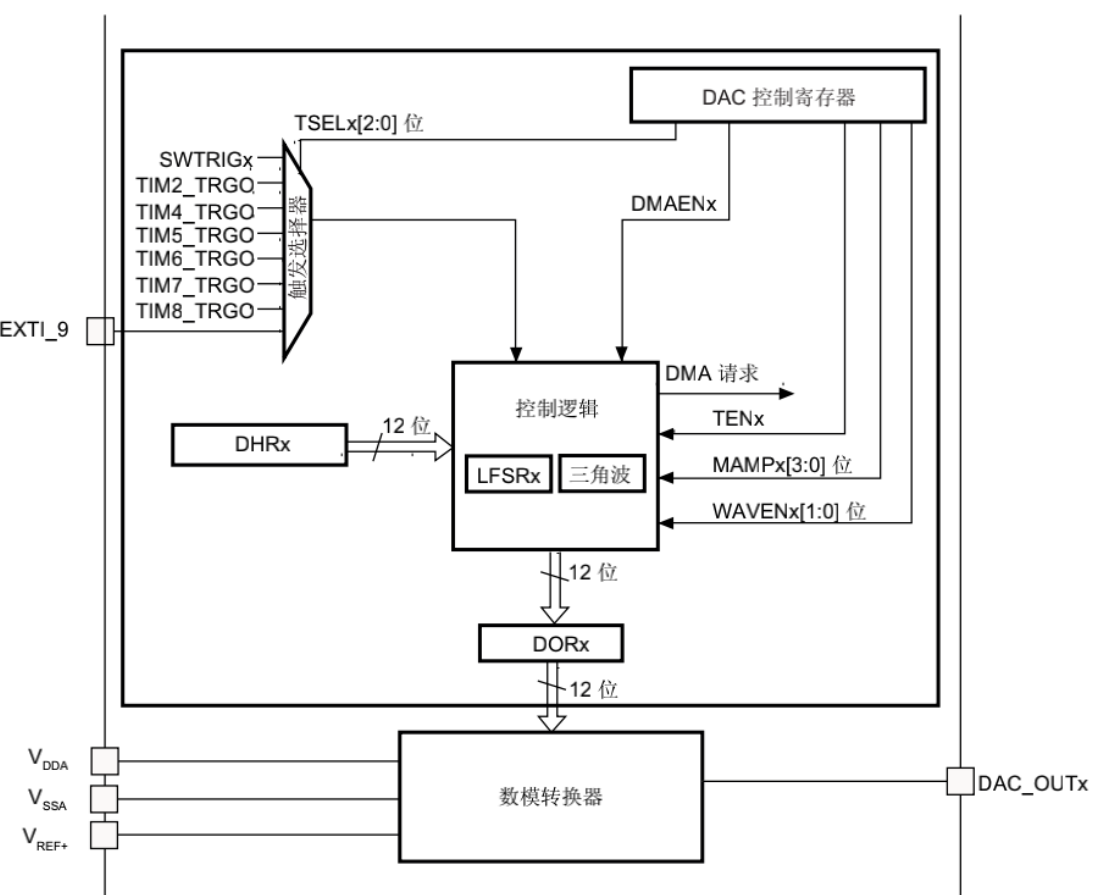
DAC转换-DAC接口的内部结构
DAC模块是12位离散数字输入、连续电压输出的数模转换器
▪ DAC可以按8位或12位模式进行配置,并且可与DMA控制器配合使用
在12位模式下,数据可以采用左对齐或右对齐方式进行存储
▪ DAC有两个输出通道,每个通道各有一个转换器
在DAC双通道模式下,每个通道可以单独进行转换
当两个通道组合在一起同步执行更新操作时,也可同时进行转换
▪ DAC可通过一个输入参考电压引脚VREF+(与ADC共享)来提高分辨率
CORTEX-M4处理器的DAC特点
- 包含2个DAC转换器,每个转换器对应一个输出通道
- 支持8位或12位的单调输出
- 12位模式下支持数据的左对齐或者右对齐存储
- 具备同步更新功能
- 可生成噪声波形
- 可生成三角波形
DAC的引脚描述
DAC功能
- DAC通道使能
- DAC输出缓存使能
- DAC输出电压
- DAC数据格式
- DAC转换
DAC通道使能
将DAC_CR寄存器的ENx位置1即可打开DAC通道x的供电,经过一段启动时间tWAKEUP之后,DAC通道x即被使能
ENx位置位只使能DAC通道x的模拟部分,即便该位被置0,DAC通道x的数字部分仍然继续工作
DAC输出缓存使能
DAC接口中集成了2个输出缓存,可以用来减少输出阻抗,无需外部运放即可直接驱动外部负载。每个DAC通道输出缓存可以通过设置DAC_CR寄存器中的BOFFx位来使能或者关闭
DAC输出电压
▪ 数字输入经过DAC被线性转换为模拟电压输出,其范围0到VREF+
▪ 任一DAC通道引脚上的输出电压均满足关系式
DAC输出=VREF×(DOR/4095)
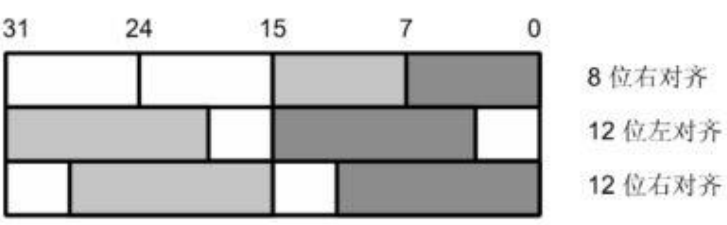
▪ DAC数据格式
- 根据不同的配置模式,数据以不同的方式写入指定的寄存器
- 对于DAC单通道x,存在三种可能的写入方式

对于DAC双通道,存在三种可能的写入方式
DAC转换
- DAC_DORx寄存器无法直接写入数据,任何输出到DAC通道x的数据都必须先写入DAC_DHRx寄存器才能传到通道x
- 如果未选中硬件触发,存入寄存器DAC_DHRx中的数据会在一个APB1时钟周期后自动传输至寄存器DAC_DORx
- 如果选中硬件触发,数据传输在触发发生之后3个APB1时钟周期后完成
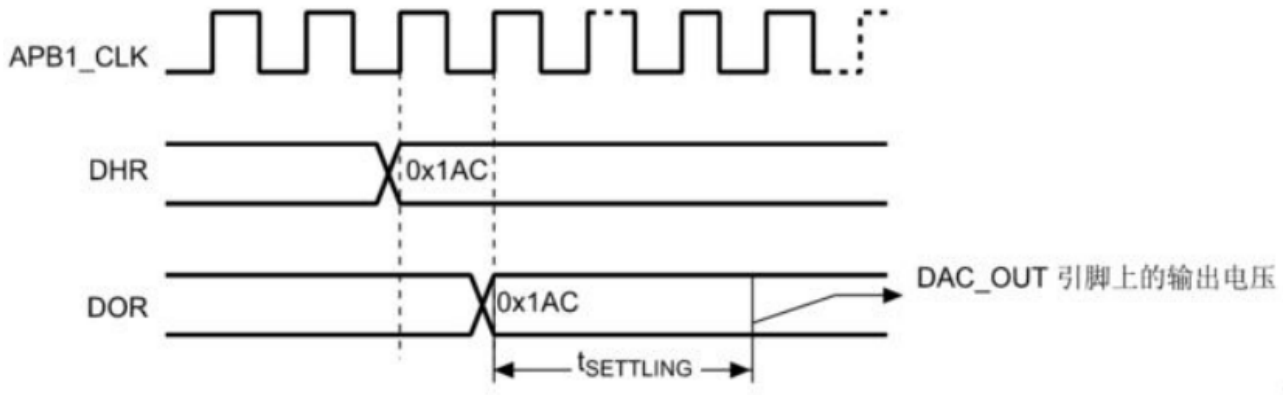
当数据从DAC_DHRx寄存器写入DAC_DORx寄存器,在经过时延tSETTLING之后,DAC的输出即有效,该时延的长短依赖于电源电压和模拟输出负载的大小
总结
- I/O接口的结构、编程方法
- 通信接口
- 人机交互
- ADC/DAC转换